
Snails are adept at climbing vertical surfaces even though they only have one wet suction cup foot. A new bio-inspired robot mimics a simple yet effective mechanism to climb walls. Fortunately, it leaves a trail of water instead of mucus.
This proof-of-concept device, known as the Sliding Suction Robot (SSR), was created by researcher Tianqi Yue and colleagues at the University of Bristol. The current version weighs just 96 g (3.4 oz) and fits comfortably in a person's hand, but the technology can be expanded as needed.
The bottom of the SSR's circular body has a 50 mm (2 in) wide suction cup. The cup is primarily made of strong, flexible polyurethane, but the underside is comprised of a mixture of silicone and a hydrophilic (water-attracting) polymer. A ring of highly absorbent foam runs around the suction cup.
University of Bristol
The robot is initially pressed firmly against the wall by hand. This action will anchor the bot to the wall, but it will not be able to move.
In order to that For this purpose, water is pumped from the onboard tank through four silicone tubes into the foam ring. Capillary action causes water to escape from the foam, forming a thin layer of liquid that runs across the underside of the suction cup and provides lubrication. and Keeps the seal.
It then uses two motorized wheels, one on each side of the suction cup, to propel the robot across the wall. but part The traces of the SSR leave water on the walls, and that liquid is constantly replaced, maintaining an effective layer on the underside of the cup. Snails secrete mucus instead of water, but they move in much the same way, maintaining suction.
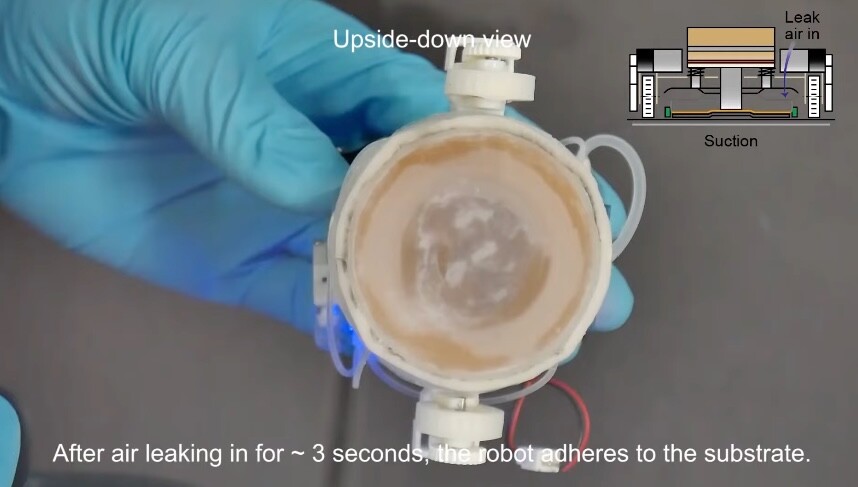
In laboratory tests, the robot was able to climb vertical glass and painted metal plates at speeds of up to 19 mm (0.75 inches) per second, rotate in place, and even move completely upside down across the underside of a horizontal glass plate. Sheet. It could also carry a payload of up to 200 g (7 oz) and withstand a downward pulling force of 1 kg (2.2 lb).
Based on these tests, scientists estimate that the SSR should have a practical runtime of approximately one hour per battery charge. It is important to note that when the robot is not moving, it does not use any force to maintain suction.
Possible applications for SSR include the inspection and maintenance of wind turbine blades, ship hulls, and high-rise building windows.
“We demonstrated that sliding suction provides low energy consumption, high adhesion efficiency and safety, high loading capacity and low complexity, while leaving only traces of water that evaporates quickly,” said Tianqi Yue. “The most exciting finding of our research is that the proposed sliding suction mechanism is a novel and neat climbing strategy and will greatly advance the development of next-generation climbing robots.”
A paper on the study was recently published in the journal. Nature Communications. You can see the SSR in action (sometimes using an external water supply) in the video below.
For another recent example of snail-inspired robots, check out the Chinese University of Hong Kong's robotic snails that cling to each other to collaboratively perform outdoor tasks.
Movement 5.4 – Demonstration of practical application
Source: University of Bristol via Newswise