
In an age of increasingly advanced robotics, one team has clearly bucked the trend and taken inspiration from the brains of tiny flying insects the size of pinheads to create a robot that can skillfully avoid collisions with very little effort and energy consumption. Yes. .
Although the small brains of insects are an unlikely source of biomimicry, researchers from the University of Groningen in the Netherlands and the University of Bielefeld in Germany believe it is an ideal system that could be applied to the way robots move. flies (Drosophila melanogaster) has very simple but effective navigation skills that involve using very little brain power to move quickly along an invisible straight line and adjusting accordingly to avoid obstacles (flying on a line slanted to the left or right).
With such small brains, fruit flies have limited computational resources available during flight. Scientists believed that this biological model could be adapted to be used in the robot's 'brain' for efficient, low-energy and obstacle-aware use. – Avoid moving.
“It’s like when you’re on a train,” said Elisabetta Chicca, a physicist at the University of Groningen. “A nearby tree appears to be moving faster than a distant house,” she said. “Insects use this information to infer how far away objects are.”
“What we learned here is that not having enough resources can oversimplify behavioral problems,” she added.

In the fruit fly brain, the movement of surrounding objects is processed through optical neurons T4 and T5. With the help of Martin Egelhaaf, a neurobiologist at the University of Bielefeld, the team algorithmically mimicked this neural activity in a small robot 'brain' to process directional information to move efficiently and avoid collisions with obstacles in its path. given the ability to do so.
“Most of robotics is not concerned with efficiency,” Chicca said. “We humans tend to learn new tasks as we grow, and this is reflected in the current machine learning trend within robotics. But insects can fly immediately at birth; the efficient way to do this is built into their brains. “
The end result is a small robot with one main goal: to steer towards the area where the least movement is detected. Thorben Schoepe of the University of Groningen, who designed the hardware, discovered through a series of tests that the wheeled robot could center itself between objects and deftly adjust its path to guide itself around obstacles, much like insects do in flight.
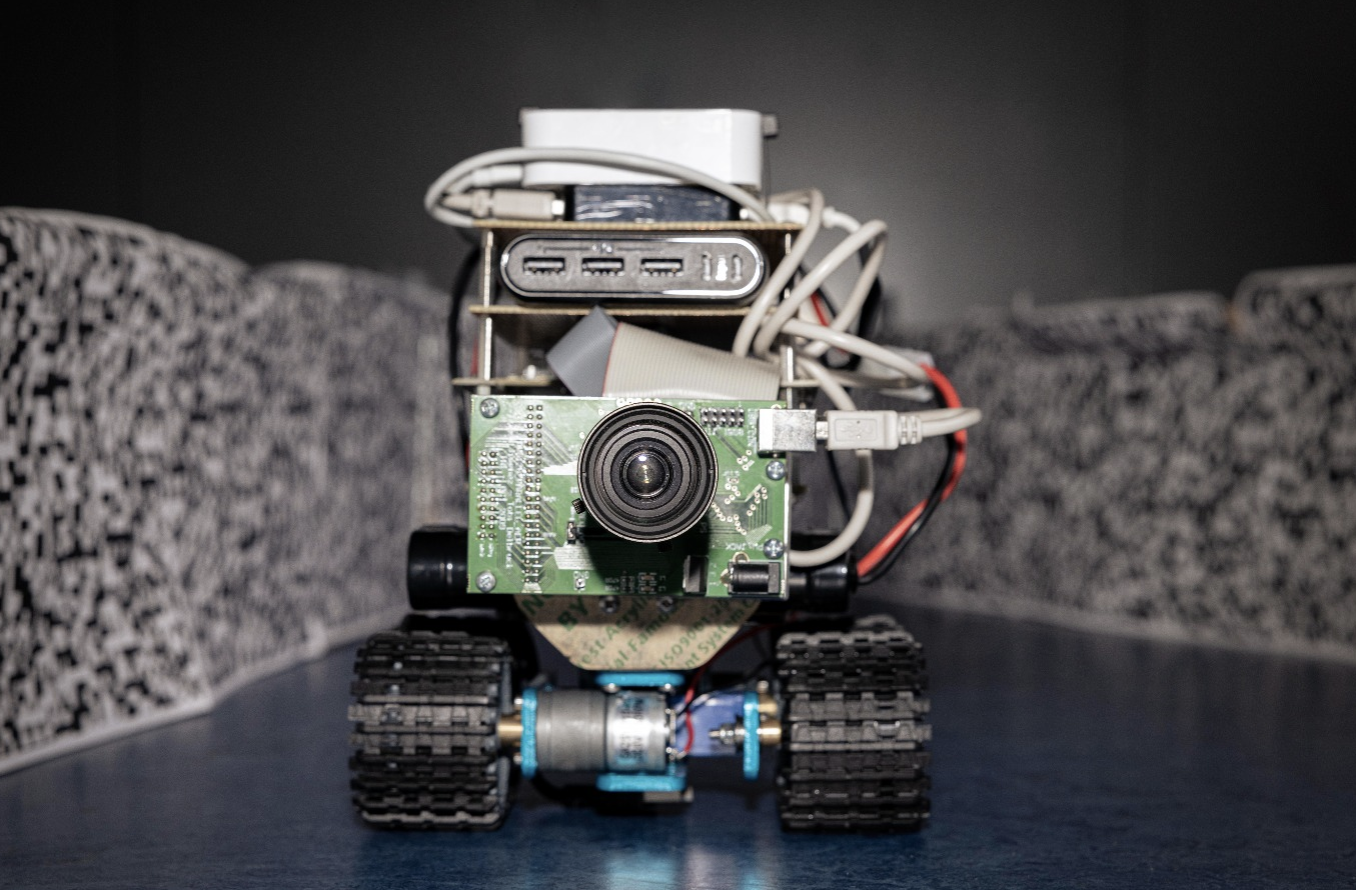
Leoni von Ristok/University of Groningen
“The model is so good that once you set it up, it will perform in all kinds of environments. That’s the beauty of this result,” Chicca said.
The team believes this is the first study to focus on obstacle avoidance and represents a major step forward in the development of neuromorphic hardware in robotics. In the future, these machines could be used to navigate complex terrain with very low energy output, such as disaster sites, and could be equipped with different types of sensors depending on the purpose, such as radar to detect structureless objects.
“We developed the robot inspired by insects,” Chicca said. “These robots have incredible capabilities to move across dense terrain, avoid collisions, cross gaps, and choose safe passageways. These functions are performed by neuromorphic networks that steer the robots into areas of low apparent motion. We The system leverages knowledge of vision processing and obstacle avoidance in insects.”
The study was published in the journal Nature Communications.
Source: University of Groningen