
Source: OpenAI's DALL·E 2 with prompts “Surrealistic drawing of a robot reading the news on a laptop in a coffee shop.”
Welcome to the fourth edition of Robo-Insight, our biweekly robotics news update! In this post, we are excited to share a variety of new developments in the field and highlight advances in robotics in areas such as mobile applications, cleaning, underwater mining, flexibility, human well-being, treatment of depression, and human interaction.
Simplified mobile robot behavioral adaptation
In the field of system adaptation, researchers at Eindhoven University of Technology have introduced a methodology that bridges the gap between application developers and control engineers in the context of behavioral adaptation of mobile robots. This approach leverages symbolic descriptions of robot behavior, known as “action semantics,” and translates them into control tasks through “semantic maps.” The goal of this innovation is to simplify motion control programming for autonomous mobile robot applications and promote integration between control software from different vendors. By establishing a structured interaction layer between the application, interaction, and control layers, this methodology can simplify the complexity of mobile robot applications, potentially leading to more efficient underground navigation and exploration systems.
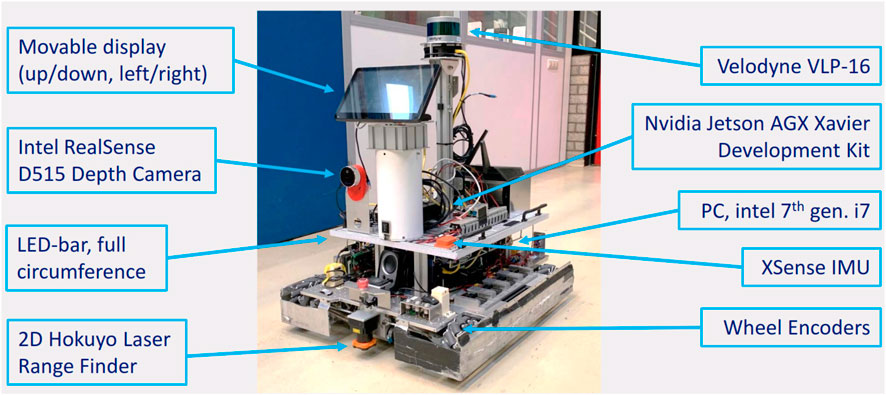
Front view of the mobile platform (hardware components indicated by blue arrows) Source.
A new robot for cleaning your home
Speaking of useful robots, Princeton University created a robot called TidyBot to solve household organization problems. Unlike simple tasks such as moving objects, actual cleaning requires robots to distinguish between objects, place them correctly, and prevent damage. TidyBot achieves this through a combination of physical dexterity, visual perception, and language understanding. Equipped with a mobile robotic arm, vision model, and language model, TidyBot can identify objects, place them in designated locations, and even infer appropriate actions with 85% accuracy. TidyBot's success demonstrates its potential to handle complex household tasks.
I'm working on TidyBot. source.
deep sea mining robot
Shifting their focus to underwater environments, researchers are addressing efficiency hurdles faced in deep-sea mining through innovative path planning for autonomous robotic mining vehicles. Because deep-sea manganese nodules have significant potential, these robotic vehicles are essential for their collection. By improving path planning methods, researchers aim to improve the efficiency of these vehicles when traversing challenging underwater terrain while avoiding obstacles. These developments could lead to more effective and responsible extraction of resources from the seabed and contribute to the sustainable utilization of valuable mineral resources.
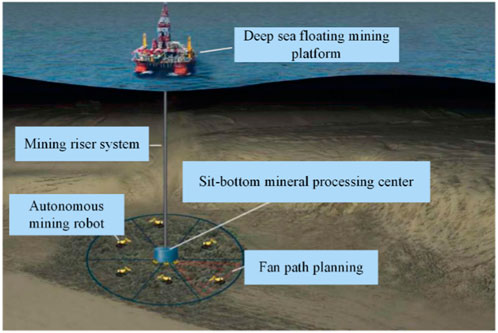
Diagram illustrating the operational framework of a deep sea mining system. source.
Advanced soft robots with agility and flexibility
Regarding the field of robotic motion, researchers at Shanghai Jiao Tong University recently developed small-scale soft robots with remarkable dexterity, capable of instantly and reversibly changing motion direction and shape reconfiguration. Powered by active dielectric elastomer artificial muscles and a unique chiral lattice foot design, this robot can change direction while moving rapidly with a single voltage input. The chiral lattice feet adjust the voltage frequency to produce a variety of motion behaviors, including forward, backward, and circular motion. Additionally, combining this structural design with shape memory materials allows robots to perform complex tasks, such as navigating narrow tunnels or forming specific trajectories. This innovation opens the door to a new generation of autonomous soft robots capable of a variety of locomotion.
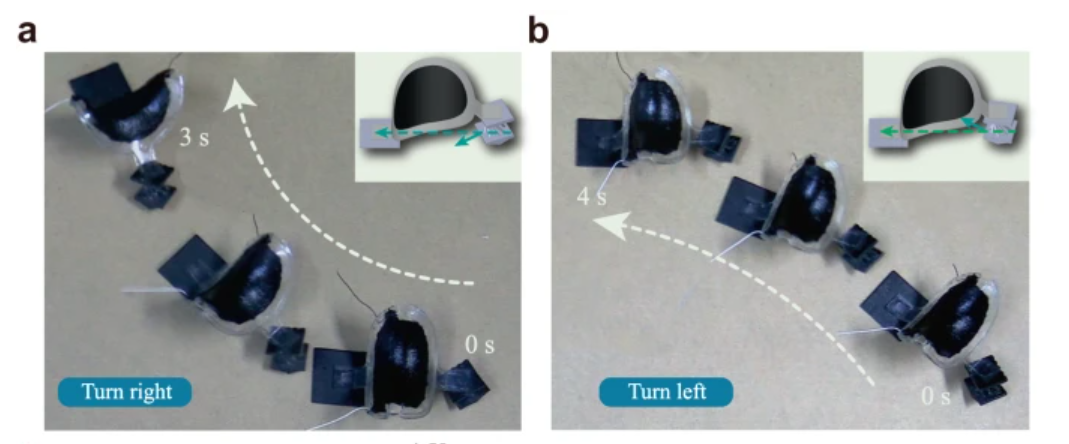
Soft robots perform circular motions in either the right or left direction by placing grid feet on each side. source.
Robot dog comforting a patient
Stanford students, focusing on the use of robotics in healthcare, worked with AI and robotics industry leaders, along with researchers and doctors, to debut a new robotic dog designed to interact with pediatric patients at Lucile Packard Children's Hospital. Patients at the hospital had the opportunity to interact with playful robots, demonstrating the potential benefits of these mechanical pets for children's wellbeing during their hospital stay. The robot, called Pupper, was developed by undergraduate engineering students and operated using a handheld controller. The goal of the demonstration was to study the interaction between robots and pediatric patients to explore ways to improve the clinical experience and reduce anxiety.

A patient playing with a robot dog. source.
Robotic innovation may help with depression
In the same vein of improving well-being, a recent pilot study investigated the potential benefits of using robotics in transcranial magnetic stimulation (TMS) for the treatment of depression. Researchers led by Dr. Hyunsoo Shin have developed a custom TMS robot designed to improve the accuracy of TMS coil placement in the brain, a critical aspect of effective treatment. By introducing a robot system, preparation time was reduced by 53% and coil position errors were greatly minimized. This study found comparable treatment effects on depression severity and regional cerebral blood flow (rCBF) between robotic and manual TMS methods, highlighting the potential of robotic assistance in improving the precision and efficiency of TMS treatment.
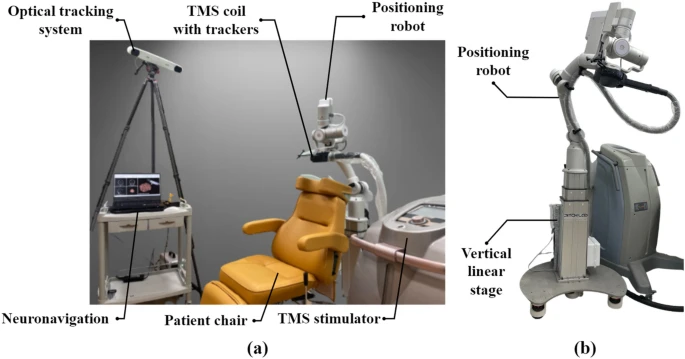
A robotic positioning device for the configuration and automated coil placement of robotic repetitive transcranial magnetic stimulation (rTMS) within a treatment facility. source.
Advanced robotic eye research
Finally, studies conducted by researchers from various institutions in the field of human-robot enhancement have explored the possibility of using robotic eyes as predictive cues in human-robot interaction (HRI). This study aimed to understand whether and how the design of predictive robotic eyes can improve interaction between humans and robots. Four types of eye designs were tested, including an arrow, a human eye, and two anthropomorphic robot eye designs. Results indicate that abstract anthropomorphic robot eyes that mimic certain aspects of human-like attention are most effective in directing participants' attention and inducing reflexive changes. These findings suggest that incorporating abstract anthropomorphic eyes into robot design can improve the predictability of robot movements and improve HRI.
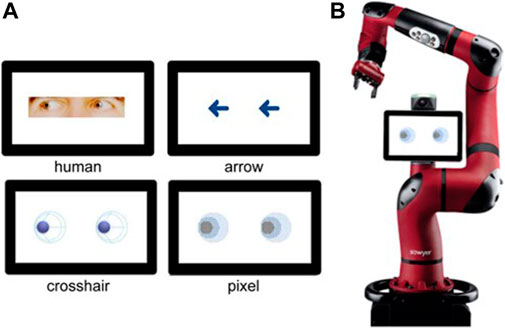
Four types of stimulation. The first row shows human (left) and arrow (right) stimuli. The second row shows abstract anthropomorphic robot eyes. A photo of Sawyer, the collaborative robot that was the subject of the questionnaire. source.
The continuous stream of developments seen in various areas highlights the adaptable and continuously advancing nature of robotics technology and shows new pathways for integration into various industrial sectors. Progressive advancements in the field of robotics reflect ongoing efforts and hints at the potential impact these advances may have in the future.
source:
- Chen, H. L., Hendrikx, B., Torta, E., Bruyninckx, H., & van de Molengraft, R. (July 10, 2023). Motion adaptation of mobile robots through semantic map construction of constraint-based controllers. Border.
- Princeton Engineering – Engineers Clean with TidyBot. (n.d.). Princeton Engineering. Checked on August 30, 2023;
- Xie, Y., Liu, C., Chen, X., Liu, G., Leng, D., Pan, W., & Shao, S. (2023, July 12). Path planning study of autonomous manganese nodule mining vehicle based on lifting mining system. Border.
- Wang, D., Zhao, B., Li, X., Dong, L., Zhang, M., Zou, J., & Gu, G. (2023). A proficient electrically driven soft robot with a reconfigurable chiral lattice foot design. Nature Communications, 14(1), 5067.
- University, S. (August 1, 2023). Robotic dogs bring joy at Stanford Hospital. Stanford report.
- Shin Hee, Jeong Hee, Ryu Woo, Lee Ji, Lee Jin, Kim Dong, Song Iyu, Jeong Yong A, and Lee Seok (2023). Robotic transcranial magnetic stimulation for the treatment of depression: a pilot study. scientific report, 13(1), 14074.
- Onnasch, L., Schweidler, P., & Schmidt, H. (July 3, 2023). The potential of the robotic eye as a predictive cue in HRI-eye tracking research.. Border.

Shaunak Kapur is a member of Robohub's volunteer team and a soon-to-be senior in high school (Texas). Shaun has been fascinated with robotics since he was young.
Shaunak Kapur is a member of Robohub's volunteer team and a soon-to-be senior in high school (Texas). Shaun has been fascinated with robotics since he was young.