
|
listen to this article  |
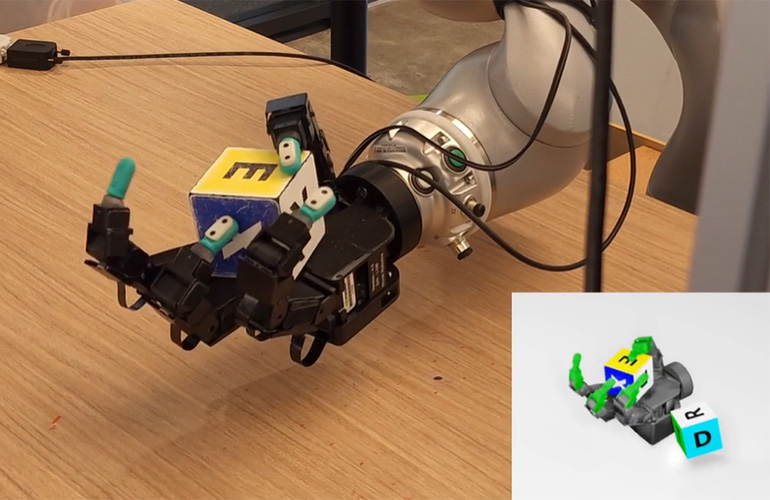
Researchers reported in ICRA that the controllers can be vectorized and used during training and deployment. | Source: NVIDIA
NVIDIA Corp. The research team presented their findings last week at the IEEE International Conference on Robotics and Automation (ICRA) in Yokohama, Japan. One group in particular presented research focused on geometric textiles, a popular topic at the event.
In robotics, trained policies such as geometric fabrics are approximations in nature. This means that while these policies generally do the right thing, they sometimes cause the robot to move too fast, collide with objects, or wander around suddenly. In general, roboticists cannot be sure of everything that can happen.
To counteract this, these trained policies are always deployed with a low-level controller layer that intercepts the policy's commands. This is especially true when the NVIDIA Robotics Research Lab team in Seattle uses reinforcement learning training policies for physical robots. These controllers then translate the instructions in the policy to relax the hardware's restrictions.
These controllers are run using reinforcement learning (RL) policies during the training phase. At this stage, the researchers discovered that unique values can be provided by GPU-accelerated RL training tools. This value vectorizes that controller so that it can be used during training and deployment.
In the real world, companies developing humanoid robots can demonstrate low-level controllers that keep the robots balanced and keep their arms from touching the body.
 Submit your presentation idea today.
Submit your presentation idea today.
Researchers leverage past work for current projects.
For this latest paper, the research team built on two previous NVIDIA projects. The first was “Geometric Fabrics: Generalizing the Classics.” “Mechanics to Capture the Physics of Behavior” won the best paper award at ICRA last year. The company's team, based in Santa Clara, California, used controllers produced in this project for vectorization.
The hand manipulation task the researchers tackle in this year's paper also comes from the well-known line of research on DeXtreme. In this new study, the researchers merged two lines of research to train DeXtreme policies on top of vectorized geometric fabric controllers.
The NVIDIA team said this brings them one step closer to using RL tools in production settings by keeping robots safer, guiding policy learning through nominal fabric behavior, and organizing simulation-to-reality (sim2real) training and deployment.
This formed a basic infrastructure that the researchers could quickly iterate on to correctly perform domain randomization during training. This sets you up for a successful sim2real deployment.
For example, by rapidly iterating between training and deployment, the team reported that they were able to achieve higher levels or robustness than previous work by adjusting the fabric structure and adding significant random perturbation forces during training.
In previous DeXtreme work, real-world experiments on real robots were very difficult. Over the course of the experiment, we wore out the motors and sensors while changing the behavior of the basic controls.
At one point, the robot broke down and started smoking. By using geometric fabric controllers that underlie the policies and protect the robots, the researchers found that they had much more freedom to deploy and test policies without worrying about the robots destroying themselves.
NVIDIA presents more research at ICRA.
NVIDIA highlighted four different papers submitted to ICRA by its researchers this year. they:
- SynH2R: Researchers in this paper proposed a framework to generate realistic human grasping movements that can be used to train robots. This method allowed the team to generate synthetic training and testing data using 100 times more objects than previous work. The team said the method is competitive with state-of-the-art methods that rely on real human motion data from both simulations and real systems.
- Out of sight, still in mind: In this paper, researchers at NVIDIA tested a robotic arm's response to previously seen but occluded objects. The team's approach allows robots to perform a number of difficult tasks, including reasoning about occluded objects, creating new object shapes, and reproducing objects. The company claimed that this approach outperforms implicit memory baselines.
- Point cloud world model: Researchers established a new point cloud world model and point cloud-based control policy that can improve performance, reduce learning time, and increase robustness of robot learners.
- SKT-Hang: This team investigated the problem of how to use robots to hang different objects on different support structures. This is an incredibly challenging problem because there are countless variations in the shape of the object and the posture of its supporting structures.
Surgical simulation uses Omniverse.
NVIDIA also introduced ORBIT-Surgical, a physically-based surgical robot simulation framework with photorealistic rendering supported by NVIDIA Isaac Sim on the NVIDIA Omniverse platform. Accelerating robotic learning research using GPU parallelization to enhance human surgical skills.
Additionally, this framework enables the generation of realistic synthetic data for active recognition tasks. Researchers demonstrated ORBIT-Surgical sim2real, which transfers learned policies to a physical dVRK robot. They plan to release the basic simulation application as a free, open source package upon publication.
Additionally, the DefGoalNet paper focuses on: shape servoIt is a robotic task dedicated to controlling objects to create specific target shapes.
Partners present their developments at ICRA.
NVIDIA partners also showcased their latest developments at ICRA. ANYbotics presented a complete software package that gives users access to low-level control, right down to the Robot Operating System (ROS).
Franka Robotics highlighted its work with the NVIDIA Isaac Manipulator, an NVIDIA Jetson-based AI companion for robot control and driving the Franka toolbox for Matlab. Enchanted Tools displayed its Jetson-based Mirokaï robot.
NVIDIA recently participated in the Robotics Summit & Expo in Boston and the grand opening of Teradyne Robotics' new headquarters in Odense, Denmark.
Enchanted Tools, an NVIDIA partner, showcased Mirokai at CES and ICRA. Source: Improved Tools